
Research
Research
My research interest is the deployment of learning, modeling and control onto soft robots and wearable technology that do not allow powerful computers in their payload. This requires rethinking our modeling, control and learning methods in order to deploy less memory-hungry brains on our soft robots. I build algorithms that allow robotic materials to perform online predictions, controls and online learning in a computationally restricted environment such as an off-the-shelf microcontroller to solve problems related to interactions with the physical environment.
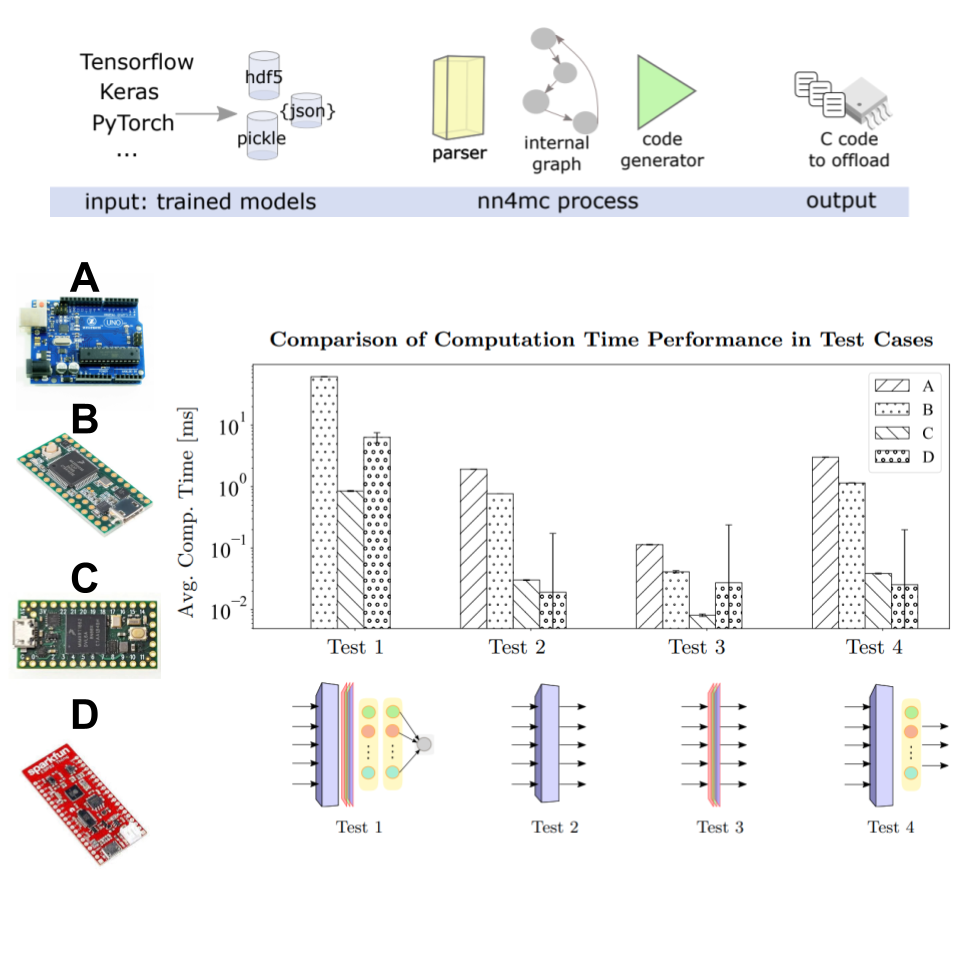
nn4mc: Neural Networks for Microcontrollers
I formulated, and together with a team, built and deployed a compiler that allows for neural networks trained in multiple Python-enabled packages, to be translated into C code that is interpretable by low-power microcontrollers in order to do real-time forward prediction of neural networks.
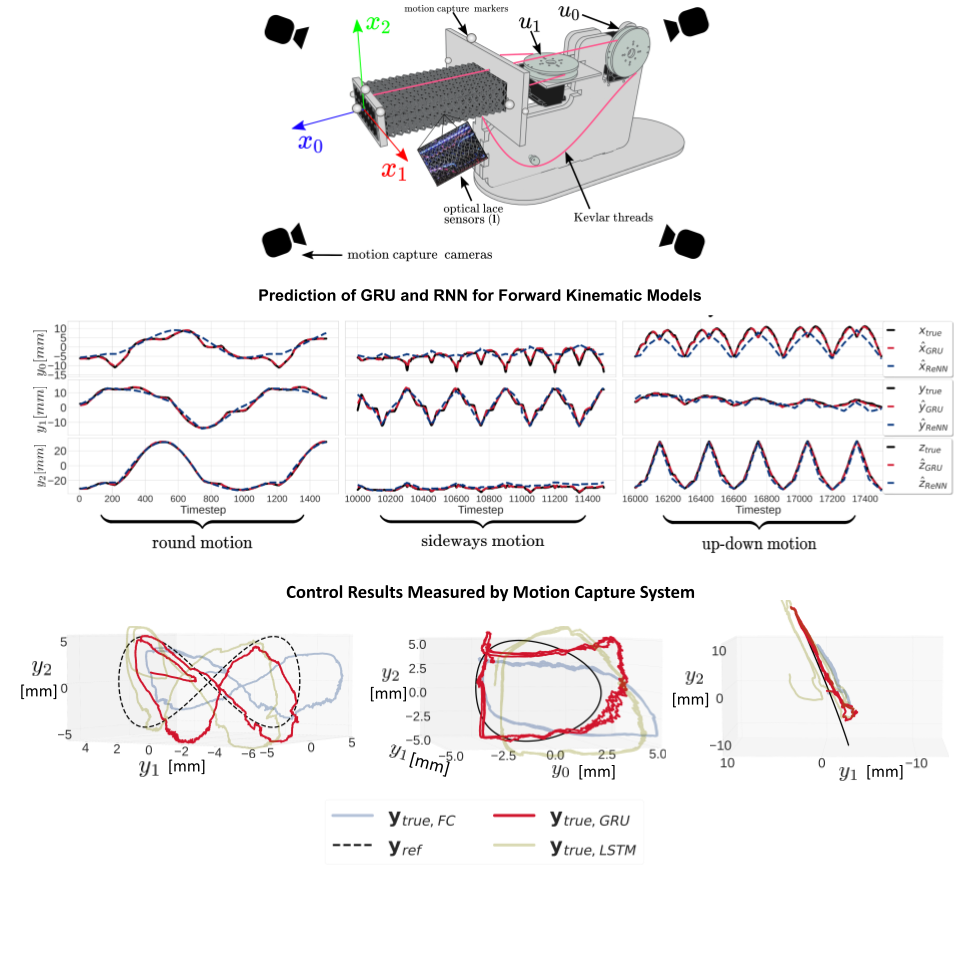
High-bandwidth nonlinear control for soft actuators
Using the compiler from the previous work, I deploy a nonlinear control algorithm where neural networks are at the core of the model prediction and we measure 42.6 mW of average power consumption, while keeping the path following root-mean-square errors lower than 5 mm.
Publications
Journal Publications:
-
Aguasvivas Manzano, S., Sundaram, V., Xu, A., Ly, K., Rentschler, M., Shepherd, R. & Correll, N. (2022). Toward smart composites: small-scale, untethered prediction and control for soft sensor/actuator systems. Under Review in the Journal of Composite Materials. Link to arxiv.
-
Tripp, C., Aguasvivas Manzano, S., Zhang, X., Lunacek, M., Graf, P. (2022) Autonomous Vehicle Trajectory Tracking via Model-Free Deep Reinforcement Learning. Under Review at the IEEE Transactions on Intelligent Transportation Systems.
-
Ly, K., Mayekar, J. V., Aguasvivas, S., Keplinger, C., Rentschler, M. E., & Correll, N. (2022). Electro-Hydraulic Rolling Soft Wheel: Design, Hybrid Dynamic Modeling, and Model Predictive Control. IEEE Transactions on Robotics.
Conferences and Proceedings:
- Pulver, B., Aguasvivas Manzano, S., Selnick, A., Kishek, S., Sliker, L., Correll, N. & Segil, J. (2022). Toward semi-autonomous prosthetic hand control: Applying embedded neural networks to improve sensor fusion in prosthetic fingertip sensors. MEC 2022. Accepted for Publication.
- Manzano, S. A., Xu, P., Ly, K., Shepherd, R., & Correll, N. (2020, November). High-bandwidth nonlinear control for soft actuators with recursive network models. In International Symposium on Experimental Robotics (pp. 589-599). Springer, Cham. Link to arxiv
- Aguasvivas Manzano, S., Hughes, D., Simpson, C., Patel, R., Correll, N. “Embedded Neural Networks for Robot Autonomy.” International Symposium on Robotics Research (2019). Link to arvix nn4mc.com
- Aguasvivas Manzano, S., Correll, N. “In-situ Deep Learning for Prediction and Controls in Smart Composites.” 22nd International Conference on Composites Materials (2019). Presentation Link to demo
- Hava, H., Zhou, L., Lombardi, L., Cui, K., Joung, H., Aguasvivas Manzano, S., et.al. “SIRONA: Sustainable Integration of Regenerative Outer-space Nature and Agriculture. Part I.” Architecture and Technology Session. International Conference on Environmental Systems (2019) Link
- Aguasvivas Manzano, S., Hughes, D., Correll, N. “Wireless Online Impact Source Localization on a Composite.” 4th International Conference on System-Integrated Intelligence (2018) Link
- Basu, K., Melton, R., Aguasvivas Manzano, S. “Time-Optimal Reorientation using Neural Networks and Particle Swarm Formulation.” AAS/AIAA Astrodynamics Specialist Conference Columbia River Gorge, Stevenson, WA (2017) Link
- Aguasvivas Manzano, S., Lavely, A., Vijayakumar, G., Brasseur, J., Schmitz, S. “Nonsteady Wind Turbine Loading Response to Passage of Daytime Atmospheric Turbulence Eddies.” Annual Meeting of the APS Division of Fluid Dynamics 68 (2015) ) Link
- Aguasvivas Manzano, S., Jha, P., Plummer, J., and Schmitz, S. “Turbulent Transport in the Wakes of Wind Turbines.” Annual Meeting of the APS Division of Fluid Dynamics 67 (2014) Link
Theses:
- Aguasvivas Manzano, S. Performance and Parsimony in Training Deep Neural Networks. Aerospace Engineering Department. The Pennsylvania State University. Masters Thesis (2017). Link to repo, Link to demo, Link to thesis
- Aguasvivas Manzano, S. Corrections to the BEMT Method for Highly Loaded Wind Turbine Blades. Aerospace Engineering Department. The Pennsylvania State University. Undergraduate Thesis (2015).
Relevant Repositories
- nn4mc: nn4mc.com Correll Lab’s Neural Network for Microcontrollers nn4mc
- Nonlinear MIMO MPC Controller for Soft Robots with Soft Embedded Sensors: link to repo
CV (Up-to-date on Jan 2022)
Sarah’s Lab Notes:
Here I keep things that were hard to figure out for me: Installing VRPN in Python3.X
Media Links
Things I believe will exist in 30 years
- Organic computers, that is, logic gates made from organic matter
- VR-enabled fully-immersive language learning experiences